Duckietown – Robotics Education & Demo Experience 2017-2019

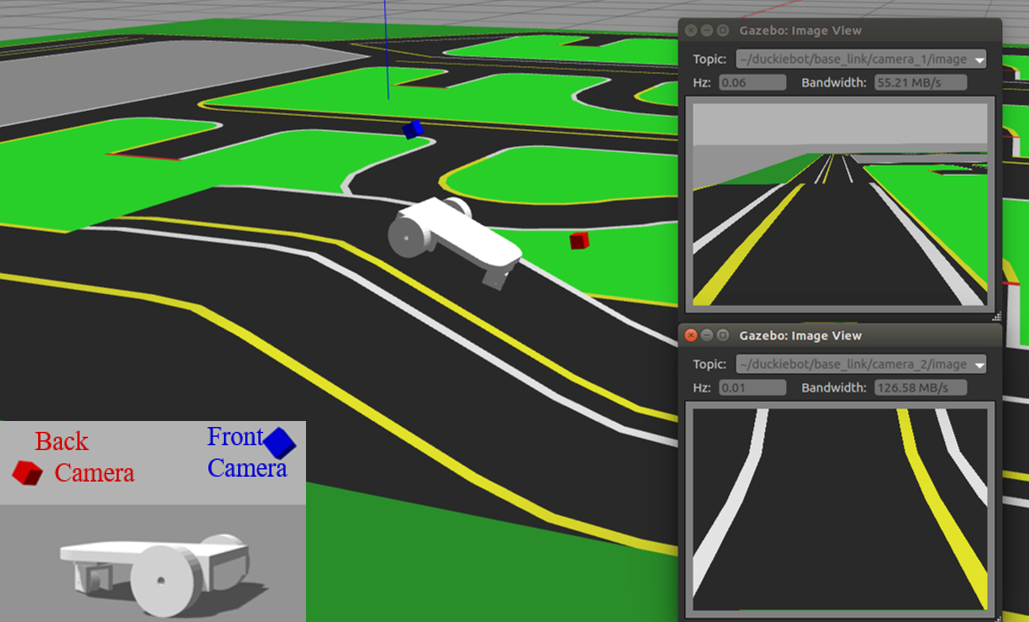
I have learnt a lot from Duckietown since I was in third grade, doing the project with professor Nick Wang. Duckiebot is my first robot and it is a self-driving car platform for education, research and promotion. For the skills’ part, I have learnt the basic knowledge of self-driving car, ROS(Robot Operating System) and openCV.

In addition, I have been to Sydney to participate RoboCup as a member of exhibitors to promote Duckietown in July, 2019. I gained a lot of valuable experience in these demo events for the students and others who don’t have the background knowledge about robotics and self-driving car.